naviSelect
iNavFIter - 精密惯性计算(Matlab App)
iNavFIter - 精密惯性计算(Matlab App)
无法加载取货服务可用情况
iNavFIter (© 专利 US11959748B2)是一种“零误差”惯性导航 (INS) 计算算法,以采样间隔内的角速度/比力增量作为输入。如果用户觉得该算法结果有吸引力,可以考虑在 naviSelect.com 获取相应的许可证进行自主实现。
软件包中包含的其他文件
l Matlab App Installer 'iNavFIter'(-mac 和 -win 版本)
升 演示输入数据文件:'imudata.zip'(3600s 数据@100Hz)
安装说明
1. 根据您的系统设置,可能需要安装 MATLAB 编译器运行时。
2. 运行应用程序安装程序“iNavFIter”(下面是 Mac OS 中的屏幕截图演示;如果您的系统中没有 Matlab Runtime,则可能需要从互联网安装,因此请确保您的计算机在安装过程中已连接到互联网)。
3. “iNavFIter”应用程序将作为独立程序安装在您的计算机上。
测试程序
1. 单击启动“iNavFIter”。
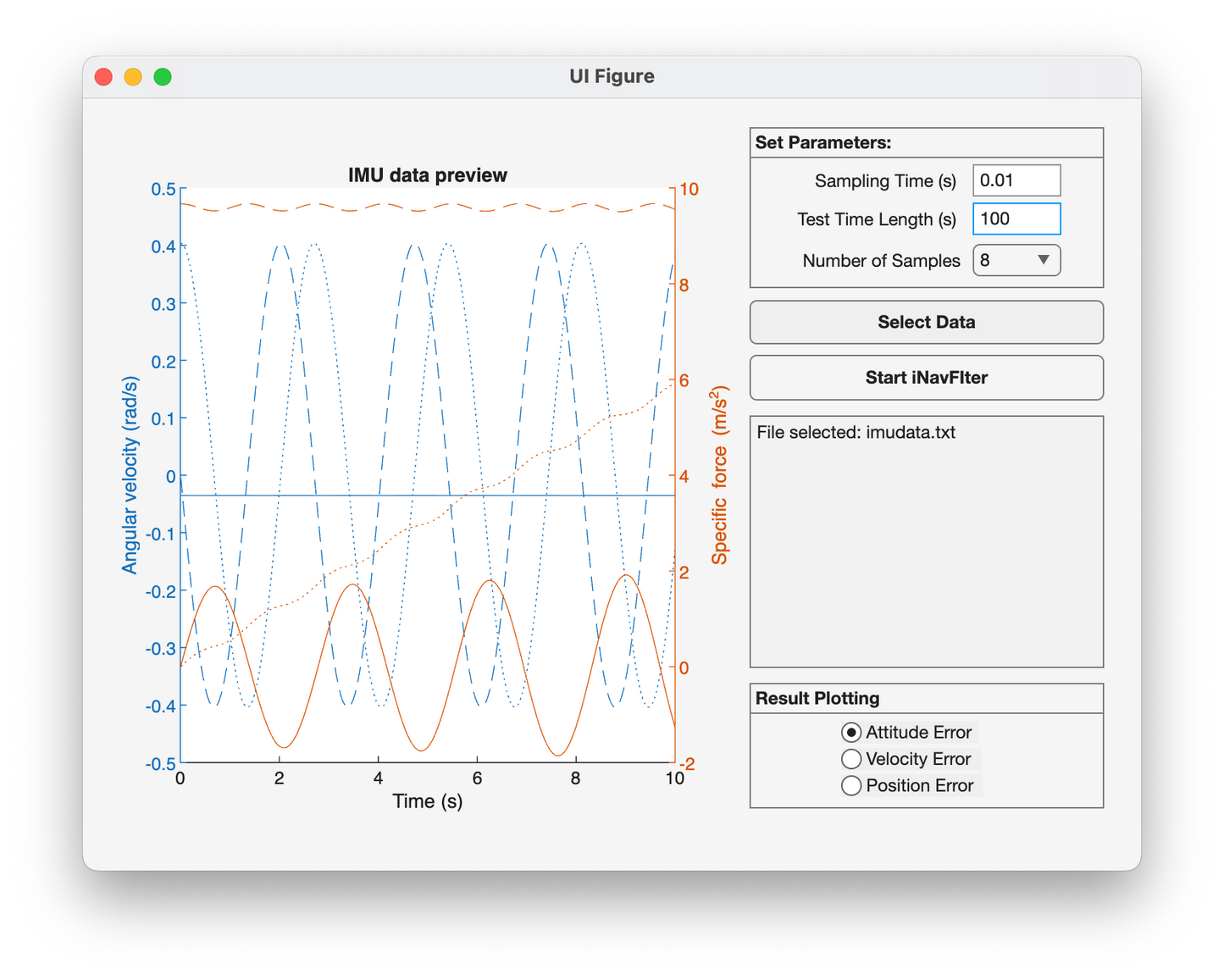
2. 设置两个参数。
'采样时间'--IMU数据的采样时间间隔
“测试时间长度”——预期的计算时间不应超过数据时间长度
“样本数”(从 2 到 8)—— iNavFIter算法一个更新间隔内的样本数。
3. 点击“选择数据”选择数据文件(ASCII文本格式),图形区域将显示前10秒内的角速度/比力(角增量/速度增量除以“采样时间”)。
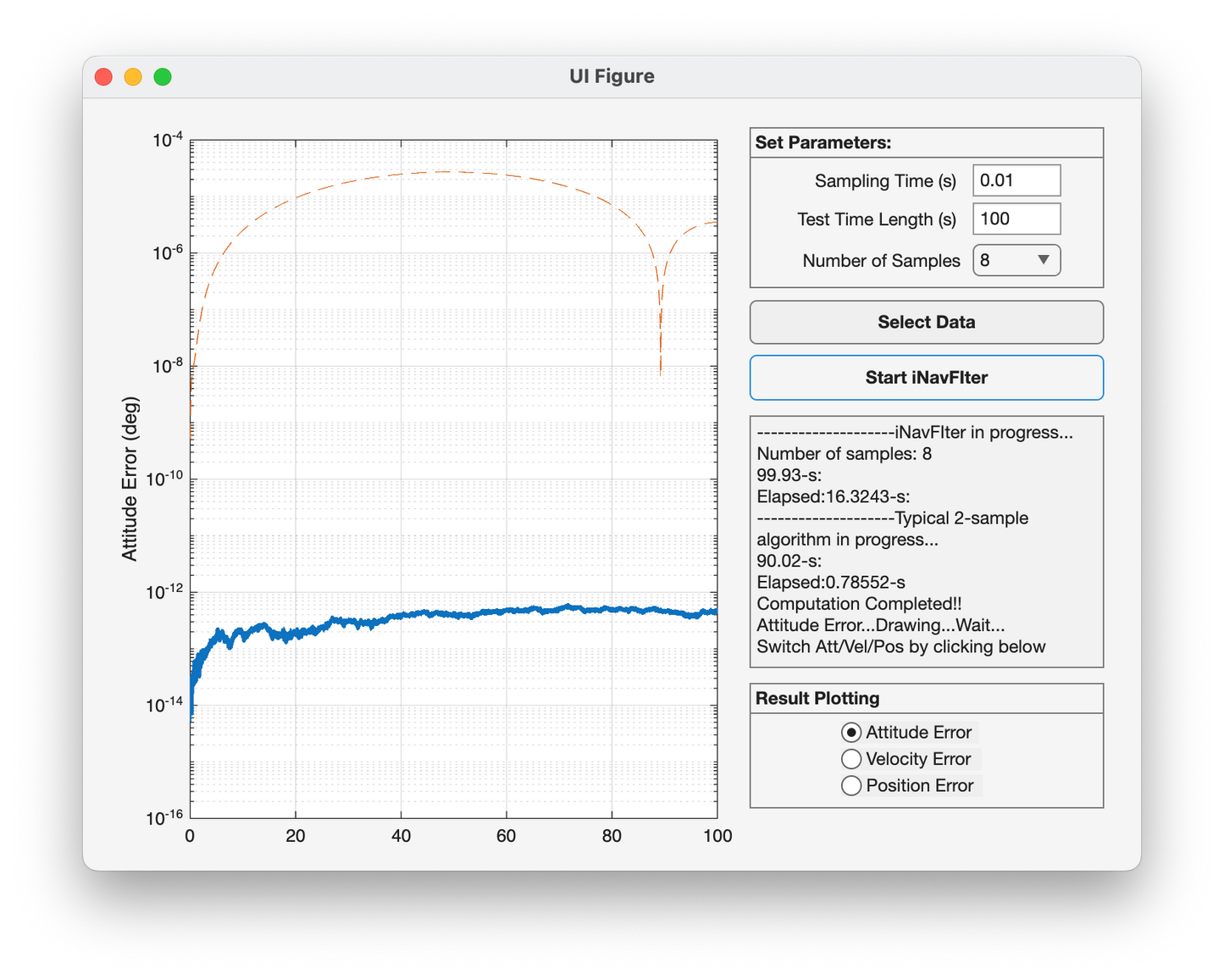
4. 点击“启动 iNavFIter”按钮,即可使用 iNavFIter 和典型的双样本算法进行惯性导航计算。计算过程中的信息会显示在按钮正下方的信息框中。如下图所示,实线表示 iNavFIter,虚线表示典型的双样本算法。
5. 如果提供了真实参考(如演示数据文件中所示),则图形区域将显示 iNavFIter 和典型双样本算法的姿态/速度/位置误差。姿态误差指的是主轴误差,速度误差以 NUE 表示,位置误差则以东西、南北和高度方向表示(计算完成后可以切换)。
6. 两种算法的计算结果分别存储在与演示数据文件同一文件夹中的“result_insfiter.dat”和“result_typn2.dat”中。
版本历史
升 Ver 1.0(2019.5.20),第1次发布
升 Ver 1.2019 (2025.9.4), Ver 1.0由 Matlab R2025a 针对此发行版重新编译