naviSelect
MagGyroCal tools for Matlab
MagGyroCal tools for Matlab
Couldn't load pickup availability
# Automatic software updates for FREE
MagGyroCal is a proprietary Matlab package of a series of algorithms to in‐situ calibrate low‐cost Inertial‐ Magnetic sensors, integrating multiple functionalities of magnetic intrinsic calibration, gyro‐aided magnetic calibration and mag‐aided gyroscope calibration.
Key Features
- Norm-based and (maximum likelihood estimation) MLE-based magnetic intrinsic calibration
- Using gyros to assist intrinsic-extrinsic calibration of magnetometer (extrinsic calibration = attitude misalignment between gyro and mag)
- Using intrinsically-calibrated magnetometer to assist gyro calibration (gyro scale matrix and bias, together with attitude misalignment between gyro and mag)
Files Contained in the Package
- Matlab App Installer ‘MyAppInstaller_web’
- User guide ‘Readme.docx’
- demo data 'data.txt'
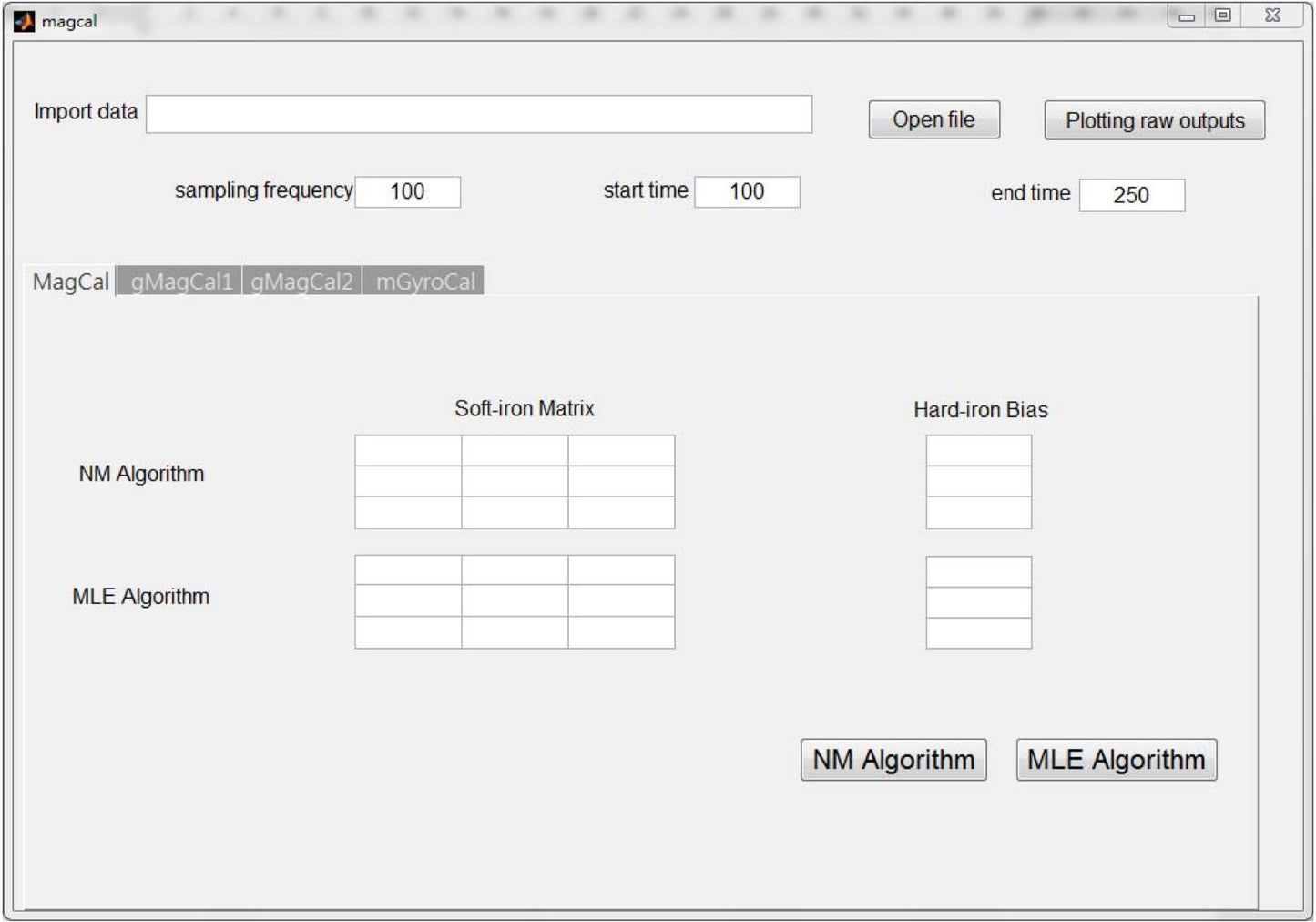
User Interface
The main interface of this software is shown on the product page. On the top of the interface is general setting options, below which there are four child interfaces corresponding to four different calibration algorithms. ‘MagCal’ is to calibrate the intrinsic of magnetometer, ’gMagCal1’ is to calibrate the exterior misalignment between magnetometer and inertial sensors, ‘gMagCal2’ is to calibrate magnetometer and align to inertial sensors. ‘mGyroCal’ is to calibrate gyroscope by way of magnetometer.
Functionability
1. MagCal
Click ‘NM’ or ‘MLE’ button, it will show the magnetometer calibration result: soft iron matrix and hard iron matrix, in the window. The MLE method has a much larger requirement of computer memory than the NM method, although it could be computationally optimized.
2. gMagCal1
Click ‘Run’ button, it will show the gyro bias as well as the misalignment matrix from the IMU body frame to the magnetometer frame in the forms of DCM and Euler Angle (rotation sequence: 2-3-1).
3. gMagCal2
Click ‘Run’ button, it will show the magnetometer calibration parameters: the soft iron matrix and hard iron, the gyro bias, and the misalignment matrix from the IMU body frame to the magnetometer frame in the forms of DCM and Euler Angle (rotation sequence: 2-3-1).
4. mGyroCal
Click ‘Run’ button,it will show the gyro calibration parameters: gyro misalignment matrix and bias, and the misalignment matrix from the IMU body frame to the magnetometer frame in the forms of DCM and Euler Angle (rotation sequence: 2-3-1).
Share