naviSelect
iNavFIter - precision inertial computation (Matlab App)
iNavFIter - precision inertial computation (Matlab App)
Couldn't load pickup availability
iNavFIter (© Patent US11959748B2) is a "zero-error" INS computation algorithm with angular velocity/specific force increments during the sampling interval as the input. If users feel the algorithm result attractive, they might consider to acquire the corresponding licenses in naviSelect.com for self-implementation.
Additional Files Contained in the Package
l Matlab App Installer ‘iNavFIter’ (-mac and -win versions)
l Demo input data file: ‘imudata.zip’ (3600s data @ 100Hz)
Install Instructions
1. Depending on your system settings, it may require to install the MATLAB Compiler Runtime.
2. Run the App Installer ‘iNavFIter’ (screenshot demo in Mac OS below; it might need to install Matlab Runtime from internet if absent in your system, so be sure your computer is connected to the internet during installation).
3. The App of ‘iNavFIter’ will be installed as a standalone program in your computer.
Test Procedure
1. Click to Launch ‘iNavFIter’.
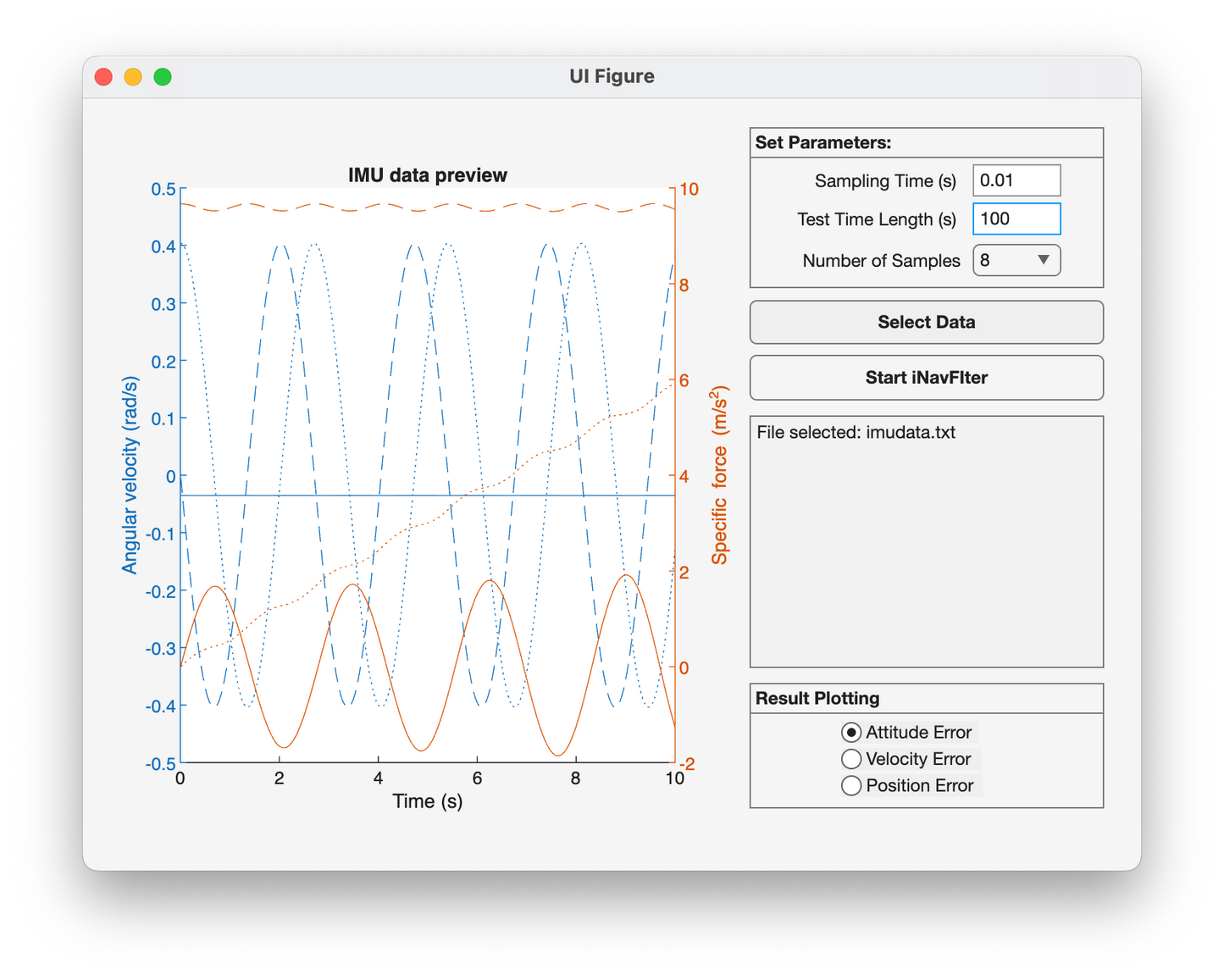
2. Set two parameters.
‘Sampling Time’--the sampling time interval of IMU data
‘Test Time Length’--the intended computation time that should be no longer than the data length in time
‘Number of Samples’ (from 2 to 8)--the number of samples in one update interval of the iNavFIter algorithm.
3. Click ‘Select Data’ to select the data file (in ASCII text format). The angular velocity/specific force (angular increments/velocity increments divided by ‘Sampling Time’) in the first 10 seconds will be displayed in the figure area.
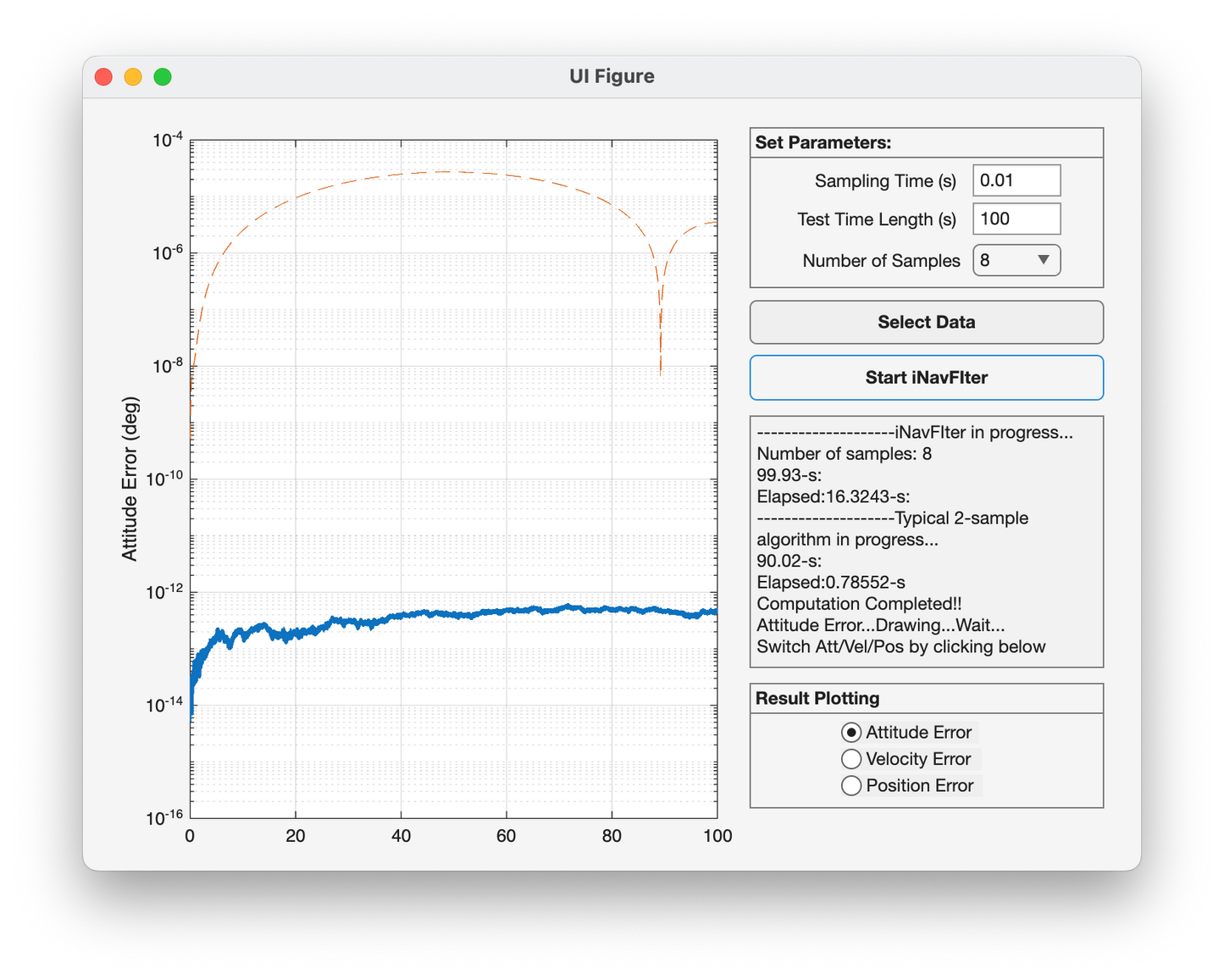
4. Click ‘Start iNavFIter’ button to compute inertial navigation by iNavFIter as well as the typical 2-sample algorithm. Information during the computation procedure is displayed in the information box immediately below the button. As shown below, the solid line is for the iNavFIter and the dotted line is for the typical 2-sample algorithm.
5. If the true reference is provided (as in the demo data file), the attitude/velocity/position errors of the iNavFIter and the typical 2-sample algorithm are both displayed in the figure area. The attitude error refers to the principal angle error, the velocity errors are expressed in NUE and the position errors are given in east-west, north-south and height directions (they could be switched after the computation was finished).
6. The computation results of the two algorithms are stored respectively in ‘result_insfiter.dat’ and ‘result_typn2.dat’ in the same folder with the demo data file.
Version History
l Ver 1.0 (2019.5.20), 1st distribution
l Ver 1.2019 (2025.9.4), Ver 1.0 recompiled by Matlab R2025a for this distribution