(VALID A YEAR SINCE PAYMENT FOR A SPECIFIC PRODUCT OF THE BUYING COMPANY WITH EMPLOYEES < 20; FOR LARGE COMPANY, THIS LICENSE IS NOT VALID AND A FORM OF CONTRACT IS REQUIRED)
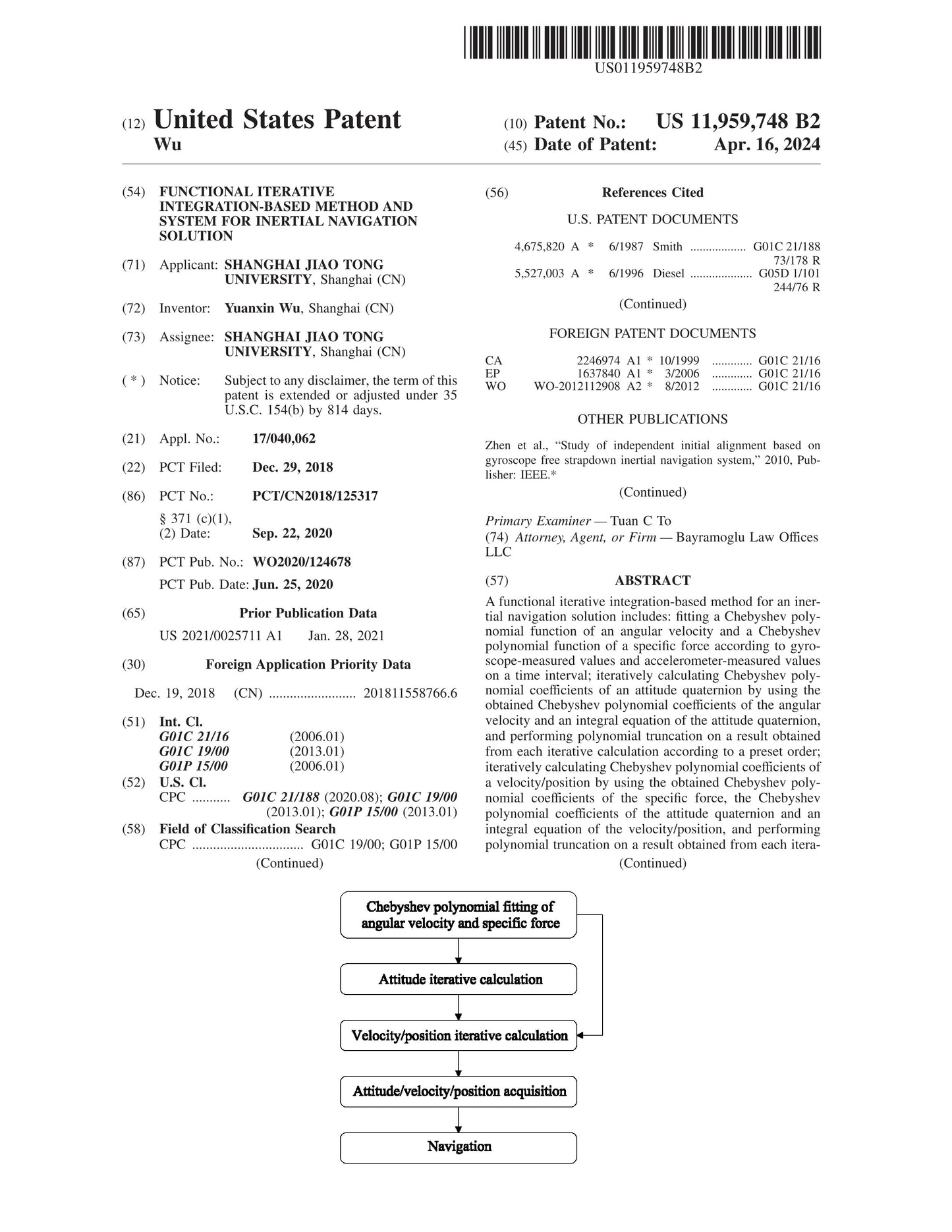
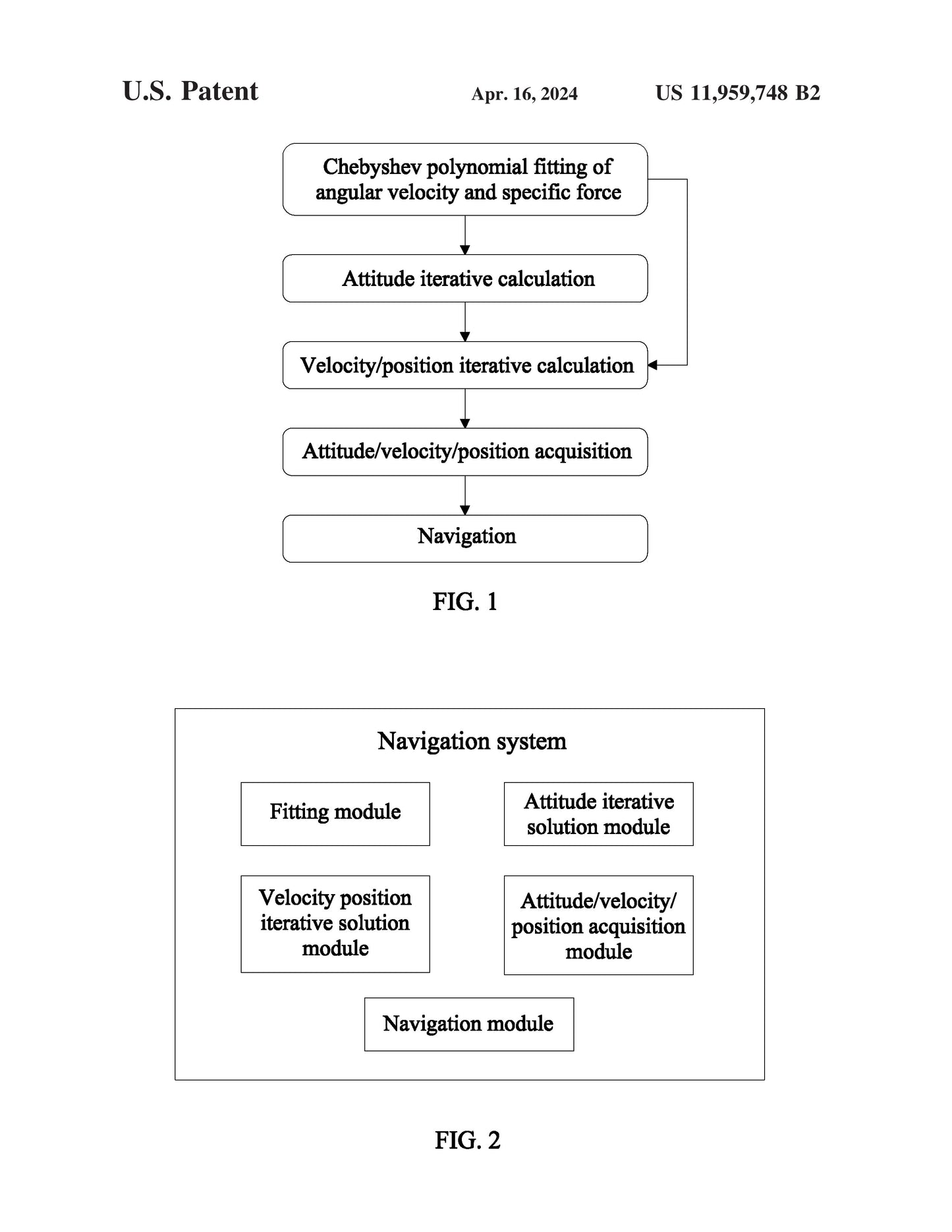
A functional iterative integration-based method for an inertial navigation solution includes: fitting a Chebyshev polynomial function of an angular velocity and a Chebyshev polynomial function of a specific force according to gyroscope-measured values and accelerometer-measured values on a time interval; iteratively calculating Chebyshev polynomial coefficients of an attitude quaternion by using the obtained Chebyshev polynomial coefficients of the angular velocity and an integral equation of the attitude quaternion, and performing polynomial truncation on a result obtained from each iterative calculation according to a preset order; iteratively calculating Chebyshev polynomial coefficients of a velocity/position by using the obtained Chebyshev polynomial coefficients of the specific force, the Chebyshev polynomial coefficients of the attitude quaternion and an integral equation of the velocity/position, and performing polynomial truncation on a result obtained from each iterative calculation according to a preset order; and obtaining attitude/velocity/position information on the corresponding time interval.