naviSelect
iNavFIter - 高精度慣性計算(Matlab アプリ)
iNavFIter - 高精度慣性計算(Matlab アプリ)
受取状況を読み込めませんでした
iNavFIter (© Patent US11959748B2)は、サンプリング間隔中の角速度/比力の増分を入力とする「ゼロエラー」INS計算アルゴリズムです。このアルゴリズムの結果に満足された場合、naviSelect.comで対応するライセンスを取得し、ご自身で実装することを検討していただけます。
パッケージに含まれる追加ファイル
l Matlab アプリケーションインストーラー「iNavFIter」(-mac および -win バージョン)
l デモ入力データファイル: 'imudata.zip' (3600秒データ @ 100Hz)
インストール手順
1. システム設定によっては、MATLAB コンパイラ ランタイムのインストールが必要になる場合があります。
2. アプリ インストーラー「iNavFIter」を実行します (以下のスクリーンショットは Mac OS のデモです。システムに Matlab ランタイムが存在しない場合はインターネットからインストールする必要がある場合があります。そのため、インストール中はコンピューターがインターネットに接続されていることを確認してください)。
3. 「iNavFIter」のアプリは、スタンドアロン プログラムとしてコンピューターにインストールされます。
テスト手順
1. クリックして「iNavFIter」を起動します。
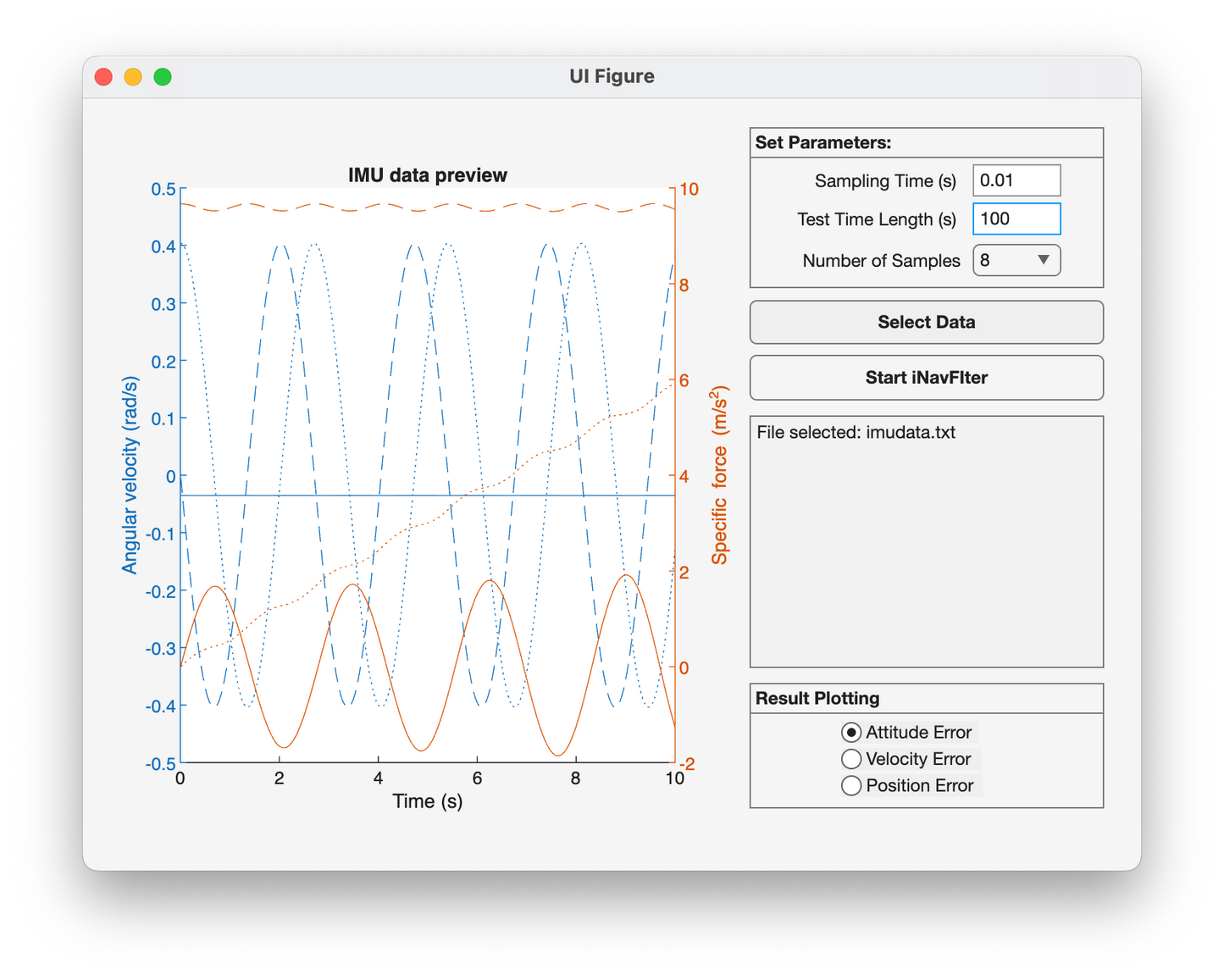
2. 2つのパラメータを設定します。
「サンプリング時間」--IMUデータのサンプリング時間間隔
「テスト時間長」 - 意図した計算時間はデータの長さよりも長くならないはずである
「サンプル数」(2 ~ 8) - iNavFIterアルゴリズムの 1 つの更新間隔内のサンプル数。
3. 「データを選択」をクリックしてデータファイル(ASCIIテキスト形式)を選択します。最初の10秒間の角速度/比力(角度増分/速度増分を「サンプリング時間」で割った値)が図領域に表示されます。
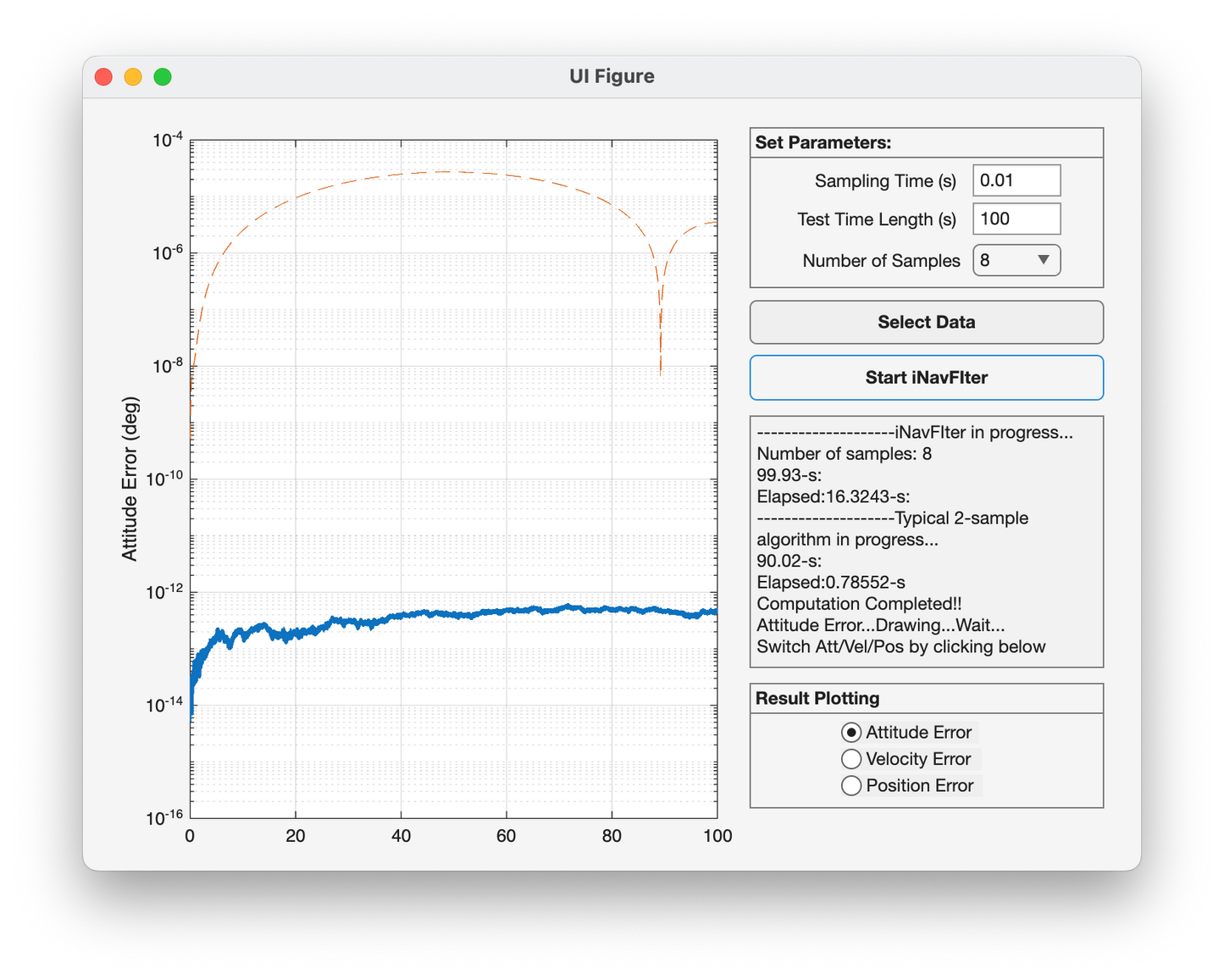
4. 「iNavFIterを開始」ボタンをクリックすると、iNavFIterと一般的な2サンプルアルゴリズムによる慣性航法計算が開始されます。計算中の情報は、ボタンのすぐ下にある情報ボックスに表示されます。下図の実線はiNavFIter、点線は一般的な2サンプルアルゴリズムによるものです。
5. 真の参照値(デモデータファイルなど)が指定されている場合、iNavFIterと一般的な2サンプルアルゴリズムの両方の姿勢/速度/位置誤差が図領域に表示されます。姿勢誤差は主角誤差を指し、速度誤差はNUEで表され、位置誤差は東西、南北、高さ方向で示されます(計算終了後に切り替えることができます)。
6. 2 つのアルゴリズムの計算結果は、デモ データ ファイルと同じフォルダー内の「result_insfiter.dat」と「result_typn2.dat」にそれぞれ保存されます。
バージョン履歴
l Ver 1.0 (2019.5.20)初回配布
l Ver 1.2019 (2025.9.4)、このディストリビューション用に Matlab R2025a で再コンパイルされたVer 1.0